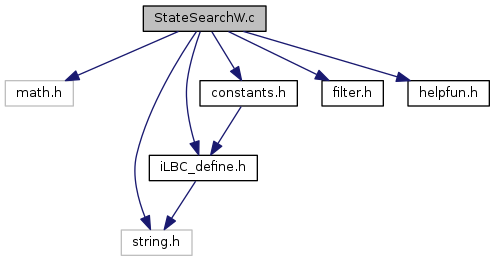
#include <math.h>#include <string.h>#include "iLBC_define.h"#include "constants.h"#include "filter.h"#include "helpfun.h"
Include dependency graph for StateSearchW.c:
Go to the source code of this file.
Functions | |
| void | AbsQuantW (iLBC_Enc_Inst_t *iLBCenc_inst, float *in, float *syntDenum, float *weightDenum, int *out, int len, int state_first) |
| void | StateSearchW (iLBC_Enc_Inst_t *iLBCenc_inst, float *residual, float *syntDenum, float *weightDenum, int *idxForMax, int *idxVec, int len, int state_first) |
Function Documentation
◆ AbsQuantW()
| void AbsQuantW | ( | iLBC_Enc_Inst_t * | iLBCenc_inst, |
| float * | in, | ||
| float * | syntDenum, | ||
| float * | weightDenum, | ||
| int * | out, | ||
| int | len, | ||
| int | state_first | ||
| ) |
Definition at line 26 of file StateSearchW.c.
References AllPoleFilter(), len(), LPC_FILTERORDER, sort_sq(), iLBC_Enc_Inst_t_::state_short_len, STATE_SHORT_LEN_30MS, state_sq3Tbl, and SUBL.
Referenced by StateSearchW().
void AllPoleFilter(float *InOut, float *Coef, int lengthInOut, int orderCoef)
Definition: filter.c:19
static int len(struct ast_channel *chan, const char *cmd, char *data, char *buf, size_t buflen)
Definition: func_strings.c:1344
void sort_sq(float *xq, int *index, float x, const float *cb, int cb_size)
Definition: helpfun.c:235
◆ StateSearchW()
| void StateSearchW | ( | iLBC_Enc_Inst_t * | iLBCenc_inst, |
| float * | residual, | ||
| float * | syntDenum, | ||
| float * | weightDenum, | ||
| int * | idxForMax, | ||
| int * | idxVec, | ||
| int | len, | ||
| int | state_first | ||
| ) |
Definition at line 121 of file StateSearchW.c.
References AbsQuantW(), len(), LPC_FILTERORDER, sort_sq(), state_frgqTbl, STATE_SHORT_LEN_30MS, tmp(), and ZeroPoleFilter().
Referenced by iLBC_encode().
static int len(struct ast_channel *chan, const char *cmd, char *data, char *buf, size_t buflen)
Definition: func_strings.c:1344
void sort_sq(float *xq, int *index, float x, const float *cb, int cb_size)
Definition: helpfun.c:235
void ZeroPoleFilter(float *In, float *ZeroCoef, float *PoleCoef, int lengthInOut, int orderCoef, float *Out)
Definition: filter.c:80
void AbsQuantW(iLBC_Enc_Inst_t *iLBCenc_inst, float *in, float *syntDenum, float *weightDenum, int *out, int len, int state_first)
Definition: StateSearchW.c:26
